Elliptic geometry is the geometry of the sphere (the 2-dimensional surface of a 3-dimensional solid ball), where congruence transformations are the rotations of the sphere about its center.
We will work with three models for elliptic geometry: one based on quaternions, one based on rotations of the sphere, and another that is a subgeometry of Möbius geometry. Using the natural identification \(xi+yj+zk\leftrightarrow (x,y,z)\) of the pure quaternions \(\R^3_\Quat\) with \(\R^3\text{,}\) we will write \(S_\Quat^2\) to denote the set of unit pure quaternions, that is,
called the special unitary group. Restricting the domain of \(M\) to \(U(\Quat)\) and restricting the codomain of \(M\) to \(M(U(\Quat))=SU(2)\) is an isomorphism of groups
The action of a unit quaternion as a rotation on \(\R^3_\Quat\) (see Proposition 1.2.9) takes the sphere \(S^2_\Quat\) to itself. The action of the group \(U(\Quat)\) on \(S^2_\Quat\) defines a model of elliptic geometry.
Subsection3.4.2The group of rotations of the 2-sphere
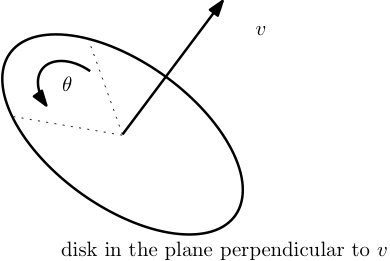
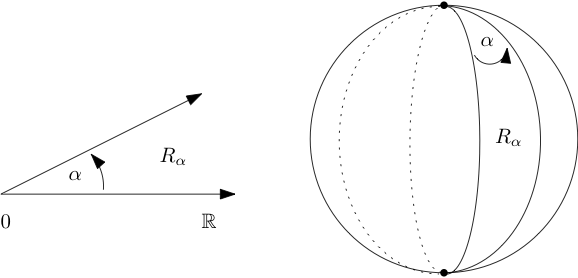
Let \(R_{{v},\theta}\) denote the rotation of \(\R^3\) about the axis given by a unit vector \({v}\) by an angle \(\theta\text{.}\) We use the standard orientation, so that a positive value of \(\theta\) is a counterclockwise rotation of the plane orthogonal to \({v}\text{,}\) as viewed from “above” where \({v}\) points in the “up” direction. See Figure 3.4.5.
Notation convention: For readability and convenience, we write \(R_{X,\theta},R_{Y,\theta},R_{Z,\theta}\) to denote rotations by \(\theta\) radians about the standard basis vectors \((1,0,0), (0,1,0), (0,0,1)\text{,}\) respectively.
of all rotations. To see why the set \(\Rot(S^2)\) is a group 1
For the purpose of a self-contained exposition based on elementary geometry, using only complex and quaternion algebra, we do not utilize the fact that \(\Rot(S^2)\) is the group \(SO(3)\) of orthogonal transformations of \(\R^3\) with determinant 1.
under the operation of composition, consider the map \(U(\Quat)\to \Rot(S^2)\) given by \(r\to R_r\) established by Proposition 1.2.9. The fact that \(R_r\circ R_s = R_{rs}\) (see Exercise 1.2.6.2) implies that the composition of two rotations is a rotation. The remaining group properties are straightforward. Once we have proved that \(\Rot(S^2)\) is a group, the same equation \(R_r\circ R_s = R_{rs}\) shows that the map \(r\to R_r\) is a homomorphism of groups \(U(\Quat)\to \Rot(S^2)\text{.}\) The kernel of this homomorphism is \(\{\pm 1\}\text{.}\) This establishes an isomorphism
Complete the details to show that \(\Rot(S^2)\) is a group. Show that the kernel of the homomorphism \(U(\Quat)\to \Rot(S^2)\) given by \(r\to
R_r\) is \(\{\pm 1\}\text{.}\)
We conclude with a useful fact about constructing arbitrary rotations by composing rotations from a specific set elementary types, namely, rotations about the \(z\)-axis by arbitrary angles, and rotations about the \(x\)-axis by \(\pi/2\) radians. We start with a Lemma that shows how to do this for \(y\)-axis rotations.
An arbitrary rotation about the \(y\)-axis is a composition of a rotations about the \(x\)-axis by \(\pi/2\) radians with a rotation about the \(z\)-axis. Specifically, we have the following.
Visualize! You can also verify by checking that both sides of (3.4.2) yield the same result when evaluated on the three standard basis vectors. Yet another proof is to do a quaternion computation.
is a generating set for \(\Rot(S^2)\text{.}\) This means that any rotation may be written as a composition of rotations about the \(z\)-axis and rotations about the \(x\)-axis by \(\pi/2\) radians.
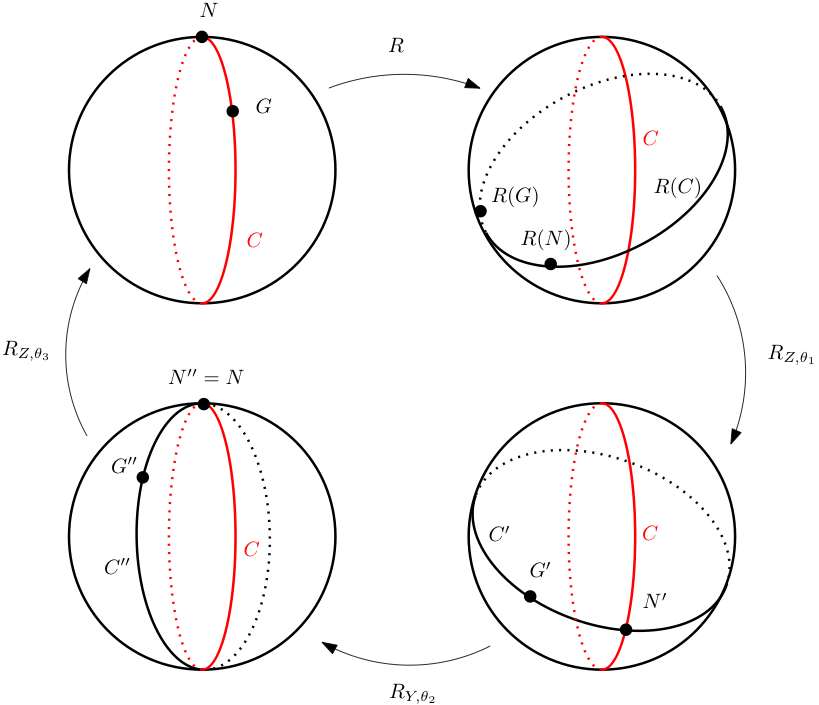
Consider a model of the sphere printed with a map of the world (i.e., a geographic globe) in such a way that the north pole is on top of the sphere and Greenwich, England (at zero degrees longitude) is in the \(x,z\)-plane. The sphere in the upper left of Figure 3.4.10 depicts this “start” position of the north pole \(N\text{,}\) Greenwich \(G\text{,}\) and the great circle \(C\) that is the intersection of the sphere with the \(x,z\)-plane (\(C\) is shown in red in all four spheres for reference). Now let \(R\) be an arbitrary rotation. The sphere in the upper right of Figure 3.4.10 shows how \(\)\(N\text{,}\)\(G\text{,}\) and \(C\) are transformed by \(R\text{.}\) The rest of the diagram shows how we can write \(R^{-1}\) as a composition of rotations by “putting the north pole back on top” and “putting zero degrees back in place”, as follows. From the upper right in the diagram, we “put the north pole back” by first performing a rotation \(R_{Z,\theta_1}\) about the \(z\)-axis that brings the north pole into the \(x,z\)-plane. Next, we perform the rotation \(R_{Y,\theta_2}\) about the \(y\)-axis (use the Lemma) to bring the north pole back to the top. Finally, we perform a rotation \(R_{Z,\theta_3}\) to bring Greenwich back home in the \(x,z\)-plane. Reading clockwise from the upper left of the diagram, the sequence of transformations
denote the group of transformations of \(\extC\) that are conjugate to rotations of \(S^2\) via the stereographic projection \(s\text{.}\) The group \(\S\) is called the elliptic group. It is easy to check that the map \(\Rot(S^2)\to
\S\) given by \(R\to s\circ R\circ s^{-1}\) is an isomorphism of groups, so we have
Exercises in Section 1.3 show that \(s\circ
R_{Z,\theta}\circ s^{-1}\) is the Möbius transformation \(T_{Z,\theta}\) given by \(z\to e^{i\theta}z\) (see Exercise 1.3.4.4) and that \(s\circ
R_{X,\pi/2}\circ s^{-1}\) is the Möbius transformation \(T_{X,\pi/2}\) given by \(z\to \frac{z+i}{iz+1}\) (see Exercise 1.3.4.6). The fact (Proposition 3.4.9) that rotations of the form \(R_{Z,\theta},R_{X,\pi/2}\) generate \(\Rot(S^2)\) implies that the Möbius transformations \(T_{Z,\theta}\) and \(T_{X,\pi/2}\) generate \(\S\text{.}\) Therefore \(\S\) is in fact a subgroup of the Möbius group.
We can say more about the specific form of elements in \(\S\) in terms of the group homomorphism \({\mathcal
T}\colon GL(2,\C)\to \M\) that sends the matrix \(\left[\begin{array}{cc} a\amp b\\ c\amp
d\end{array}\right]\) to the Möbius transformation \(z\to \frac{az+b}{cz+d}\) (see (3.2.2)). Observe that the transformations
are images of elements of the group \(SU(2)\) (see (3.4.1)). Because \(T_{Z,\theta},T_{X,\pi/2}\) generate \(\S\text{,}\) it follows that every element of \(\S\) is the image under \({\mathcal T}\) of an element of \(SU(2)\text{.}\)
Let \(M_{Z,\theta},M_{X,\pi/2}\) denote the matrices \(\twotwo{e^{i\theta/2}}{0}{0}{e^{-i\theta/2}},
\twotwo{1/\sqrt{2}}{i/\sqrt{2}}{i/\sqrt{2}}{1/\sqrt{2}}\text{,}\) respectively. Verify that \(M_{Z,\theta},M_{X,\pi/2}\) are indeed elements of \(SU(2)\text{.}\) Verify (3.4.3) and (3.4.4). Explain the final comment in the paragraph above. Why does it follow that every element of \(\S\) is the image of an element of \(SU(2)\text{?}\)
Proposition3.4.14.Formula for transformations in the elliptic group.
A map \(T\) is an element of \(\S\) if and only if \(T\) may be written in the form \(Tz=\frac{az+b}{-b^\ast z+a^\ast}\) for some \(a,b\in \C\) with \(|a|^2+|b|^2=1\text{.}\)
Subsection3.4.4Circles in \(S^2\) and clines in \(\extC\)
A circle in \(S^2\) is a circle in a plane intersecting \(S^2\text{.}\) A great circle is the intersection of \(S^2\) with a plane through the origin. In elliptic geometry, a great circle is called an elliptic straight line because the path of shortest length connecting two given points in \(S^2\) is an arc of a great circle. Circles in \(S^2\) that are not great circles are called elliptic cycles. Elliptic straight lines and elliptic cycles in the Möbius subgeometry model \((\extC,\S)\) are stereographic projections of elliptic straight lines and elliptic cycles in the spherical model. It turns out that elliptic straight lines and elliptic cycles in \(\extC\) are in fact clines. Here is the statement and proof.
Proposition3.4.15.Stereographic projection takes circles to clines.
Let \(C\) be a circle that is the intersection of \(S^2\) with a plane in \(\R^3\text{.}\) If \(C\) contains the north pole \((0,0,1)\) of \(S^2\text{,}\) then \(s(C\setminus\{(0,0,1)\})\) is a Euclidean straight line in \(\C\text{.}\) Otherwise, \(s(C)\) is a circle in \(\C\text{.}\)
Proof sketch: The statement about the case when \(C\) contains the north pole is geometrically clear. For the case when \(C\) does not contain \((0,0,1)\text{,}\) choose a rotation \(R\) of \(S^2\) that takes some point on \(C\) to the north pole. Again, let \(T=s\circ R\circ s^{-1}\) be the conjugate element in \(\S\text{.}\) It is clear that \(R\) takes \(C\) to a circle, that \(s\) takes \(R(C)\) to a Euclidean straight line, and that \(T^{-1}\) takes \(s(R(C))\) to a cline (because \(T^{-1}\) is a Möbius transformation!). Thus \(s(C)=(T^{-1}\circ s\circ R)(C)\) is a cline. Because \((0,0,1)\) is not on \(C\text{,}\) it must be that \(\infty\) is not on \(s(C)\text{,}\) so \(s(C)\) is a circle in \(\C\text{.}\)
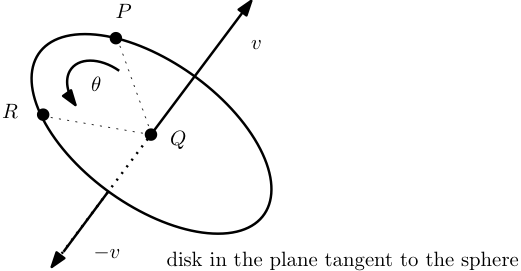
The standard orientation for angles on \(S^2\) (see Subsection 3.4.2) is also called the outward-pointing normal orientation. The standard orientation measures angles from the viewpoint of an observer standing on the outside of the sphere. The inward-pointing normal orientation is the reverse orientation that measures angles from the viewpoint of an observer walking on the inside of the sphere. See Figure 3.4.16.
Figure3.4.16.Two orientations on the sphere: oriented angle \(\angle
PQR\) is positive viewed from the outward-pointing normal vector \(v\text{,}\) but is negative viewed from the inward-pointing vector \(-v\text{.}\)
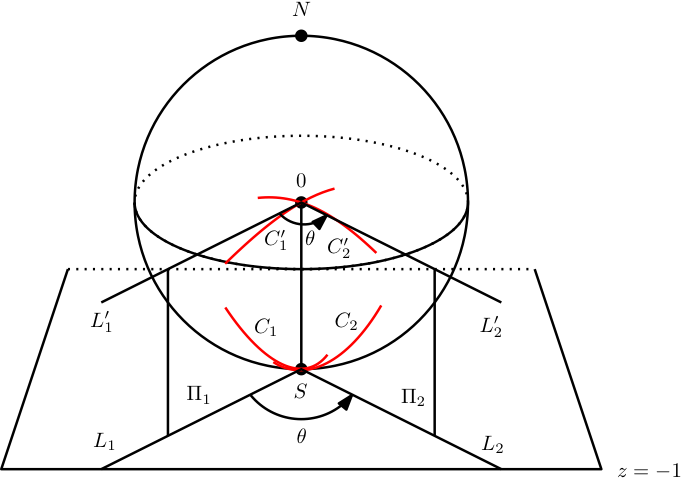
Proof sketch: Begin with the special case of curves \(C_1,C_2\) that intersect at the south pole \(S=(0,0,-1)\text{.}\) The lines \(L_1,L_2\) that are tangent to \(C_1,C_2\) at \(S\) lie in planes \(\Pi_1,\Pi_2\) that contain the south pole and the origin. The tangents \(L_1,L_2\) also lie in the plane \(z=-1\) tangent to the sphere at the south pole. It is clear that the lines \(L_1',L_2'\) tangent to \(s(C_1),s(C_2)\) at \(s(S)=0\) are straight lines that intersect at the origin. The angle made by \(L_1,L_2\) is the same as the angle made by the planes \(\Pi_1,\Pi_2\text{,}\) but with inward-normal orientation! See Figure 3.4.18. Now suppose two curves intersect at \(P\text{.}\) Choose a rotation \(R\) of \(S^2\) that takes \(P\) to the south pole, and let \(T=s\circ R\circ s^{-1}\) be the conjugate element in \(\S\text{.}\) It is clear that \(R\) and \(T\) are conformal (because \(T\) is a Möbius transformation!). Now the fact that \(s\) is conformal at \((0,0,-1)\) implies that \(s=T^{-1}\circ s\circ
R\) is conformal at \(P\text{.}\)
The distance between points \(P,Q\) on \(S^2\) is the length of the arc of a great circle that connects them. Because the sphere has radius 1, the arc length is the same as the radian measure of the angle \(\angle
POQ\text{,}\) where \(O\) is the origin. From vector calculus, we have the following dot product formula.
To “transfer” the metric (3.4.6) to \(\extC\) by stereographic projection means that we define the elliptic metric \(d_{\extC}\) on \(\extC\) by the following.
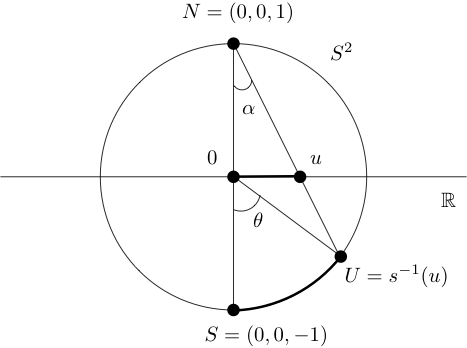
In order to obtain a formula for computing \(d_{\extC}(p,q)\text{,}\) we follow the same procedure for hyperbolic distance. First, we find the distance \(d_{\extC}(0,u)\text{,}\) where \(0\leq u\leq
1\text{.}\) Let \(S=(0,0,-1)=s^{-1}(0)\) and let \(U=s^{-1}(u)\text{.}\) Let \(0=(0,0,0)\text{,}\) let \(N=(0,0,1)\text{,}\) let \(\alpha =
\angle SNU\) and let \(\theta = \angle SOU\) (see Figure 3.4.20). It is a simple exercise to show that \(\alpha = \theta/2\text{,}\) so that we have
\begin{equation}
d_{\extC}(0,u)=d_{S^2}(S,U)=\theta = 2\alpha=2\arctan u. \tag{3.4.9}
\end{equation}
For the general case, let \(z_1,z_2\in \extC\text{,}\) and let \(Tz=e^{it}\frac{z-z_1}{z_1^\ast z+1}\) be the transformation in \(\S\) (using the form (3.4.5)) that sends \(z_1\to 0\) and \(z_2\to u\geq 0\text{.}\) Applying (3.4.9), we have the elliptic distance formula in \(\extC\text{.}\)
Now let \(\gamma\) be a parametric curve \(z(t)=x(t)+iy(t)\) in \(\extC\text{.}\) Using the same argument as in the paragraph preceding the hyperbolic length integral formula (3.3.6), using the first order Taylor approximation \(\arctan u \approx u\) and making the appropriate changes, we arrive at the elliptic length integral formula.
Show that the first order Taylor approximation for \(\arctan u\) is \(u\text{.}\) Complete the details of modifying the derivation of the hyperbolic length integral formula to obtain the elliptic length integral formula.
Using the same argument as in the paragraph preceding the hyperbolic area integral formula (3.3.7), using the elliptic length differential \(ds=\frac{2|z'(t)|\;dt}{1-|z(t)|^2}\) in place of the hyperbolic length differential and making the appropriate changes, we obtain the elliptic area integral formula.
\begin{equation}
\text{Area}(R)=\iint_R
dA = \iint_R \frac{4r\;dr\;d\theta}{(1+r^2)^2}\tag{3.4.12}
\end{equation}
An elliptic 2-gon is a figure with two vertices connected by two elliptic line segments. In \(\extC\text{,}\) any 2-gon is congruent to a set of the form \(R_{\alpha} :=\{z\in \C\colon
0\leq \arg z \leq \alpha\}\cup \{\infty\}\) for some \(\alpha\) in the range \(0\leq \alpha\lt
2\pi\text{.}\) See Figure 3.4.25. Use an area integral in \(\extC\) to show that the area of \(R_{\alpha}\) is \(2\alpha\text{.}\) Verify that this is the right answer using a picture of \(S^2\text{.}\)
Figure3.4.25.2-gons in \(\extC\) and \(S^2\text{.}\)
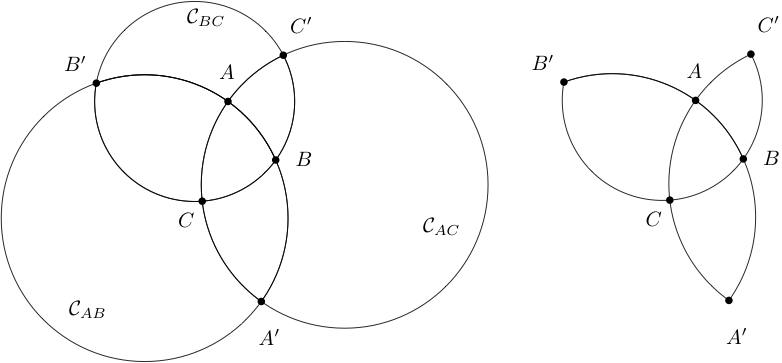
Let \(\triangle ABC\) be an elliptic triangle. Let \({\mathcal C}_{AB},{\mathcal
C}_{AC},{\mathcal C}_{BC}\) denote the great circles that extend the sides \(AB,AC,BC\) of the triangle. See Figure 3.4.26.
Explain why \(A,A'\) are endpoints of the same diameter, that is, endpoints of a diameter of \(S^2\) or their stereographic projections in \(\extC\text{.}\)
Explain why \(\triangle A'B'C'\) has the same area as \(\triangle ABC\text{,}\) even though the two triangles are not necessarily congruent! (Note that the interior of \(\triangle A'B'C'\) is the exterior of the three great circles, that is, on the side that contains the point \(\infty\text{.}\)) Hint: What does part (a) of this problem imply about the relationship between points \(X\) and \(X'\) on \(S^2\) for \(X=A,B,C\text{?}\)