An integral part of the modern understanding of geometry is the concept of congruence transformation, or simply symmetry. The symmetries of a geometric space preserve inherent properties of figures, such as distance, angle, and area. In his 1872 work called the Erlanger Programm, 1
The German term Erlanger Programm (or “Erlangen program” in English) is named after the city Erlangen, where Klein worked at the university.
Felix Klein unified the study of a wide variety of geometric spaces by overtly placing the group of congruence transformations as part of the structure of a geometry. The following is a version of Klein’s definition of geometry.
A geometry is a pair \((X,G)\text{,}\) where \(X\) is a set, called the (model) space, and \(G\) is a group, called the group of congruence transformations, that acts on \(X\text{.}\) Subsets of \(X\) are called figures. Figures \(F,F'\) are called congruent if there is an element \(g\) in \(G\) such that \(g(F)=F'\text{.}\) We write \(F\cong F'\) to denote that figures \(F,F'\) are congruent.
Note on terminology and notation: Throughout this chapter on geometry, the term transformation will always mean a one-to-one and onto map of a space to itself. Given a geometry \((X,G)\) with group action \(\phi\colon G\to \Perm(X)\text{,}\) we will abuse notation and write \(g\colon X\to X\) to denote the map \(\phi(g)\colon X\to
X\) for an element \(g\) in \(G\text{.}\) It is common usage to say “the transformation \(g\)” to mean “the transformation \(\phi(g)\)” of the space \(X\text{.}\)
Planar Euclidean geometry. The model space for planar Euclidean geometry is the plane \(\R^2\text{.}\) The group of congruence transformations consists of translations, rotations, reflections, and their compositions. Specifically, Euclidean congruences are functions of the form \({v}\to R{v}+{b}\text{,}\) where \({v} \in
\R^2\text{,}\)\(R\) is an element of the group of \(2\times 2\) orthogonal matrices, and \({b}\in\R^2\text{.}\)
Spherical geometry. The model space for spherical geometry is the sphere \(S^2=\{(x,y,z)\in \R^3\colon
x^2+y^2+z^2=1\}\text{.}\) The group of congruence transformations consists of rotations of the sphere and reflections across planes through the origin. Specifically, spherical congruences are functions of the form \({v}\to R{v}\text{,}\) where \({v} \in
\R^3\text{,}\)\(|{v}|=1\text{,}\) and \(R\) is an element of the group of \(3\times 3\) orthogonal matrices.
Projective geometry. The model space for a projective geometry is projective space \(\Proj(V)\text{,}\) where \(V\) is a vector space \(V\) (see Exercise 2.5.7 in the previous chapter). The group of congruence transformations is the projective linear group \(PGL(V)\text{.}\)
Much of this chapter on geometry is devoted to a family of planar geometries whose model spaces are the extended complex plane \(\hat{\C}=\C\cup\{\infty\}\) (described in section Section 1.3) and some of its subsets. One of the properties shared by the congruence transformations in all of these planar geometries is conformality, or angle preservation. To say that a transformation \(T\) is conformal means that if two curves \(C_1\) and \(C_2\) make an oriented angle \(\theta\) at a point \(P\) of intersection, then the two image curves \(T(C_1)\) and \(T(C_2)\) also make the same oriented angle at the point \(T(P)\) of intersection (the angle made by two curves is the angle made by their tangents at the point of intersection). See Figure 3.1.3. Exercise Group 3.1.4.2–5 examines the conformal properties of the four basic types of complex functions summarized in Table 3.1.4.
Remark on convention: If \(\alpha\in \C\) and if we write \(\alpha \gt 0\text{,}\) this implies that we mean that \(\alpha\) is real and positive. This remark pertains to the definition of homothety 2
Some texts define homothety to mean that \(k\) can be any nonzero real scalar. We follow the convention from complex analysis that restricts homotheties to positive real scalars. For example, see [1].
in Table 3.1.4 above, and in the classification of normal forms, summarized in Table 3.2.28 in the next section.
Subsection3.1.3Subgeometries and equivalent geometries
Definition3.1.5.Subgeometry.
We say that a geometry \((X,G)\) is a subgeometry of a geometry \((Y,H)\) if \(X\) is a subset of \(Y\) and \(G\) is a subgroup of \(H\) and the action of \(G\) on \(X\) is compatible with the action of \(H\) on \(Y\) in the sense that \(g\cdot x\) has the same value in both geometries \((X,G)\) and \((Y,H)\) for all \(g\in G, x\in X\text{.}\)
Geometries \((X,G)\) and \((Y,H)\) are equivalent if there is a bijective map \(\mu\colon X\to Y\) such that every element of \(H\) has a conjugate transformation in \(G\) and every element of \(G\) has a conjugate transformation in \(H\text{.}\) In symbols: 3
See the note on terminology at the beginning of this section: the equation \(\mu\circ g\circ \mu^{-1}
= h\) below really means \(\mu\circ \phi(g)\circ
\mu^{-1} = \psi(h)\text{,}\) where \(\phi,\psi\) are the actions of \(G\) on \(X\) and \(H\) on \(Y\text{,}\) respectively.
for every \(g\in G\text{,}\) there is an \(h\in H\) such that \(\mu\circ g\circ \mu^{-1} = h\text{,}\) and
Note on terminology: The term “geometry” is used to refer to a specific model as in Definition 3.1.1, and also to refer to an equivalence class of geometries. 4
This is similar to the situation for groups, where the term “the cyclic group of order \(n\)” can refer to additive group \(\Z_n\text{,}\) or the multiplicative group of \(n\)th complex roots of unity, or simply the isomorphism class of these groups.
1.Warm up exercises with the three example geometries.
Find the Euclidean congruence transformation that takes the triangle with vertices \((2,0),(6,0),(6,3)\) to the triangle with vertices \((0,-1),(0,-5),(3,-1)\text{.}\)
Find all possible spherical congruences that take the three points \((0,0,1),(0,0,-1),(1,0,0)\) to the three points \((1,0,0),(-1,0,0),(0,1,0)\) (in that order). One of these is a rotation: find an axis and angle for that rotation.
Find the projective transformation in \(PGL(2,\C)\) that takes the three points \([(1,1)],[(0,1)],[(1,0)]\) in \(\Proj(\C^2)\)to \([(a,1)],[(b,1)],[(c,1)]\) (in that order).
Let \(d(P,Q)\) denote the distance between points \(P,Q\) in Euclidean geometry, and let \(T\) be a Euclidean congruence transformation. Show that \(d(T(P),T(Q))=d(P,Q)\text{.}\)
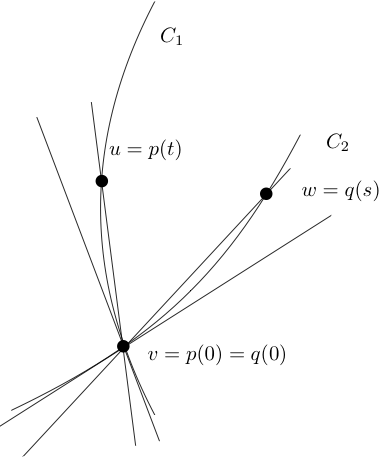
The complex plane comes with a built-in measure of oriented angle. If \(u\) is a positive real number, \(v=0\text{,}\) and \(w\neq 0\) is a complex number, the measure of the oriented angle \(\angle uvw\) is \(\arg w\text{.}\) More generally, if \(u,v,w\) are three complex numbers with \(v\) distinct from \(u\) and \(w\text{,}\) the measure of the oriented angle \(\angle uvw\) is
Now suppose two curves \(C_1,C_2\) intersect at \(v\text{,}\) let \(u\) be a point on \(C_1\) and let \(w\) be a point on \(C_2\text{.}\) If \(u\) and \(w\) are close to \(v\text{,}\) then \(\angle uvw\) is a secant approximation of an angle made by the tangents to \(C_1,C_2\) at \(v\text{.}\) See Figure 3.1.7. Now let \(p(t),q(s)\) be parameterizations of \(C_1,C_2\text{,}\) respectively, with \(p(0)=q(0)=v\text{,}\) and \(p(t_1)=u\text{,}\)\(q(s_1)=w\) for some \(t_1,s_1\gt 0\text{.}\) We can compute an angle made by the tangents to the curves by the following limit.
The value of limit (3.1.2) is sensitive to the direction of the curve parameterizations and the sided-ness of the limits \(t\to 0^{\pm}\) or \(s\to 0^{\pm}\text{.}\) If the value of the limit (3.1.2) is \(\theta\) for one set of choices for parameterizations and sided-ness, the limit for the other choices will be \(\theta\) or \(\theta \pm \pi\text{.}\) For a given pair of parameterizations \(p,q\text{,}\) draw a sketch to illustrate the four possible cases \(t\to 0^{\pm},s\to 0^{\pm}\text{.}\)
Let \({\mathcal E}_1\) denote the set of Euclidean congruence transformations given above in Subsection 3.1.1. Let \({\mathcal E}_2\) denote the set of complex functions that can be written as compositions of the following three types.
Suppose that \((X,G)\) and \((Y,H)\) are equivalent geometries. Is it necessarily the case that \(G\) and \(H\) are isomorphic groups? If yes, give a proof. If no, give a counterexample.